Examples¶
The examples given in this chapter show how to create, train and use neural networks in pyrenn for different systems. All examples can be found in the folder python\examples or matlab\examples.
Friction Curve¶
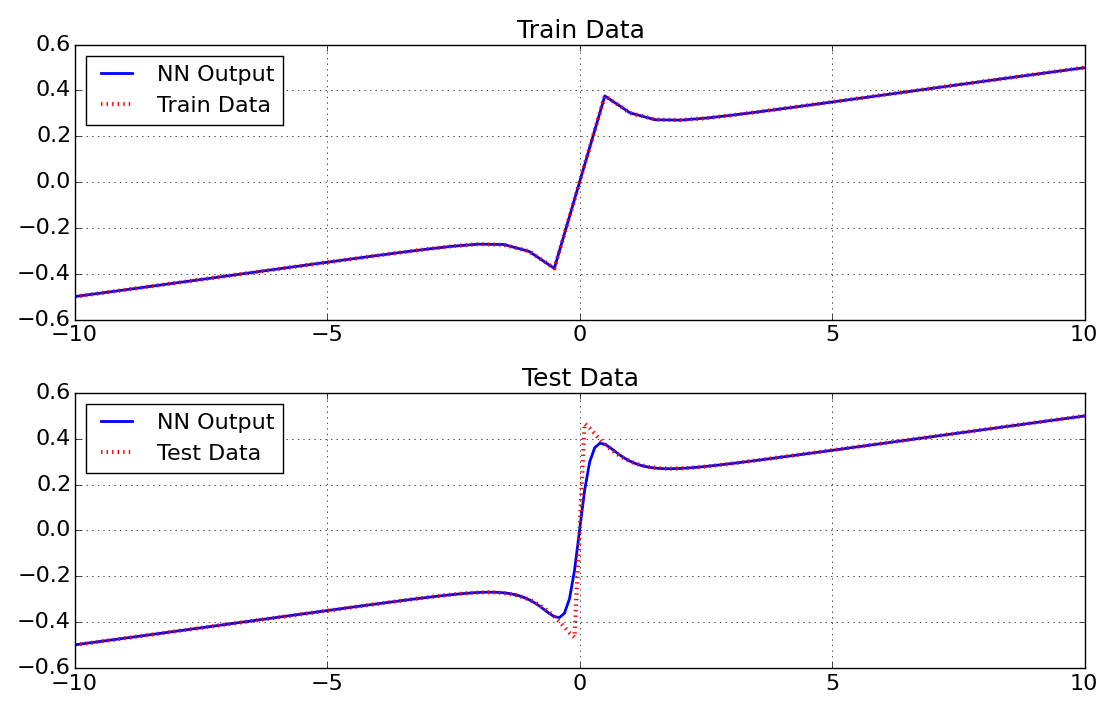
In this example a neural network is used to learn the friction curve of a system, which is given by the following function, where \(F\) is the friction force and \(v\) is the velocity:
For training 41 data samples of the velocity and the resulting friction force are given.
This is an example of a static system with one output and one input and can be found in python\examples\example_friction.py and matlab\examples\example_friction.m.
Python¶
At first the needed packages are imported. pandas for reading the excelfile, matplotlib for plotting the results and pyrenn for the neural network.
import pandas as pd
import matplotlib.pyplot as plt
import pyrenn as prn
Then the training input data P and output (target) data Y as well as the test input data Ptest and output data Ytest is read from the given excel file using pandas. Because we have only one input and one output here, the input and output data can be either a 1d numpy array, where the number of elements represents the number of data samples (this is the case here), or a 2d numpy array with shape (1,Q), where Q is the number of data samples.
df = pd.ExcelFile('example_data.xlsx').parse('friction')
P = df.loc[0:40]['P']
Y = df.loc[0:40]['Y']
Ptest = df['Ptest'].values
Ytest = df['Ytest'].values
Then the neural network is created. Since we have a system with 1 input and 1 output, we need a neural network with the same number of inputs and outputs. For this system we choose a neural network with two hidden layers, each with 3 neurons. Since the friction curve is a static system, we do not need a recurrent network and no delayed inputs, so we do not have to change the delay inputs.
net = prn.CreateNN([1,3,3,1])
Now we can train the created neural network net with the training data P and Y. verbose=True activates diplaying the error during training. We set the number of iterations (epochs) to 100 and the termination error to 1e-5. The Training will stop after 100 iterations or when Error <= E_stop.
net = prn.train_LM(P,Y,net,verbose=True,k_max=100,E_stop=1e-5)
After the training is finished, we can use the neural network. We calculate the neural network output y, using the training data P as input as well as the the output ytest, using the test data Ptest as input.
y = prn.NNOut(P,net) ytest = prn.NNOut(Ptest,net)
Now we can plot the results, comparing the output of the neural network with the training and the test data of the system.
fig = plt.figure(figsize=(11,7)) ax0 = fig.add_subplot(211) ax1 = fig.add_subplot(212) fs=18 #Train Data ax0.set_title('Train Data',fontsize=fs) ax0.plot(P,y,color='b',lw=2,label='NN Output') ax0.plot(P,Y,color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Train Data') ax0.tick_params(labelsize=fs-2) ax0.legend(fontsize=fs-2,loc='upper left') ax0.grid() #Test Data ax1.set_title('Test Data',fontsize=fs) ax1.plot(Ptest,ytest,color='b',lw=2,label='NN Output') ax1.plot(Ptest,Ytest,color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Test Data') ax1.tick_params(labelsize=fs-2) ax1.legend(fontsize=fs-2,loc='upper left') ax1.grid() fig.tight_layout() plt.show()
Matlab¶
At first the training input data P and output (target) data Y as well as the test input data Ptest and output data Ytest is read from the given excel file using xlsread. Because we have only one input and one output here, the input and output data has to be an array with size (1,Q), where Q is the number of data samples.
file = 'example_data.xlsx';
num = xlsread(file,'friction');
P = num(1:41,2).';
Y = num(1:41,3).';
Ptest = num(:,4).';
Ytest = num(:,5).';
Then the neural network is created. Since we have a system with 1 input and 1 output, we need a neural network with the same number of inputs and outputs. For this system we choose a neural network with two hidden layers, each with 3 neurons. Since the friction curve is a static system, we do not need a recurrent network and no delayed inputs, so we do not have to change the delay inputs.
net = CreateNN([1,3,3,1])
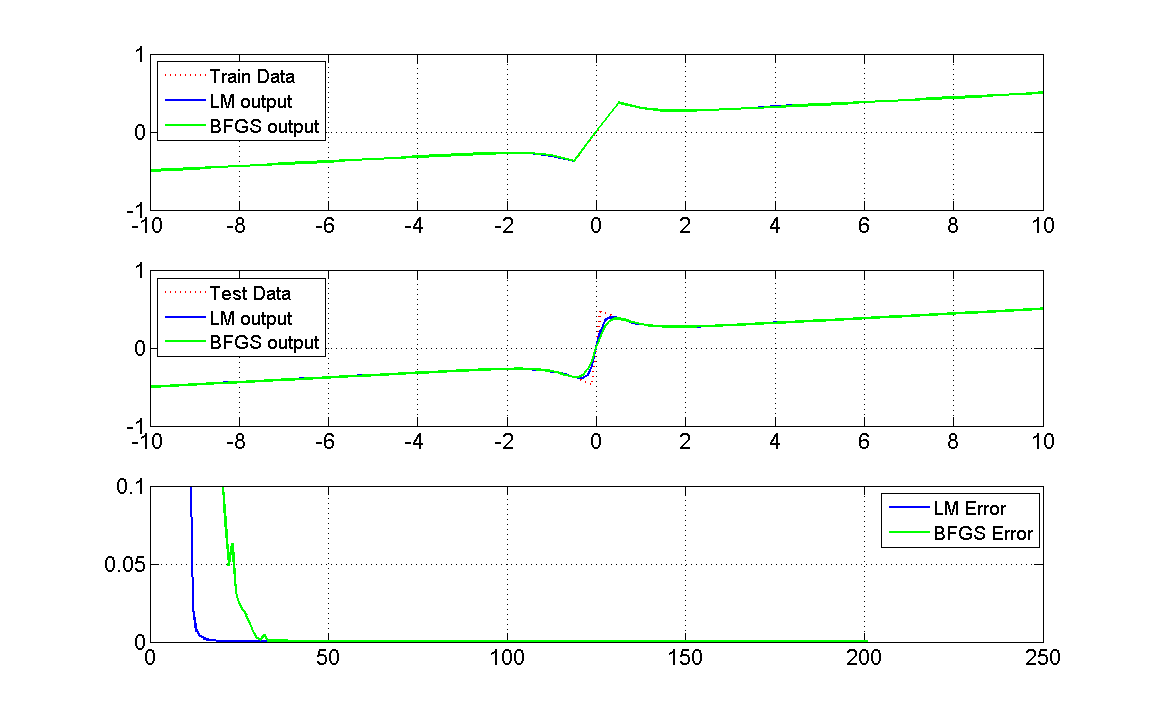
Now we can train the created neural network net with the training data P and Y. In matlab we have the option to train the network with the LM algorithm or the BFGS algorithm.
We start with the LM algorithm. We set the number of iterations (epochs) to 100 and the termination error to 1e-5. The Training will stop after 100 iterations or when Error <= E_stop.
netLM = train_LM(P,Y,net,100,1e-5);
After the training is finished, we can use the neural network. We calculate the neural network output y_LM, using the training data P as input as well as the the output ytest_LM, using the test data Ptest as input.
y_LM = NNOut(P,netLM);
ytest_LM = NNOut(Ptest,netLM);
Now we can do the same using the BFGS algorithm. The BFGS algorithm usually takes less time for one iteration, but needs more iterations to reach the same error than the LM. Therefore we set the number of iterations (epochs) to 200 and the termination error to 1e-5.
netBFGS = train_BFGS(P,Y,net,200,1e-5);
y_BFGS = NNOut(P,netBFGS);
ytest_BFGS = NNOut(Ptest,netBFGS);
Now we can plot the results, comparing the output of the two different neural networks with each other and with the training and the test data of the system.
fig = figure();
set(fig, 'Units', 'normalized', 'Position', [0.2, 0.1, 0.6, 0.6])
axis tight
subplot(311)
set(gca,'FontSize',16)
plot(P,Y,'r:','LineWidth',2)
hold on
grid on
plot(P,y_LM,'b','LineWidth',2)
plot(P,y_BFGS,'g','LineWidth',2)
l1 = legend('Train Data','LM output','BFGS output','Location','northwest');
set(l1,'FontSize',14)
subplot(312)
set(gca,'FontSize',16)
plot(Ptest,Ytest,'r:','LineWidth',2)
hold on
grid on
plot(Ptest,ytest_LM,'b','LineWidth',2)
plot(Ptest,ytest_BFGS,'g','LineWidth',2)
l2 = legend('Test Data','LM output','BFGS output','Location','northwest');
set(l2,'FontSize',14)
subplot(313)
set(gca,'FontSize',16)
plot(netLM.ErrorHistory,'b','LineWidth',2)
hold on
grid on
plot(netBFGS.ErrorHistory,'g','LineWidth',2)
ylim([0,0.1])
l3 = legend('LM Error','BFGS Error','Location','northeast');
set(l3,'FontSize',14)
Second order transfer function (PT2)¶
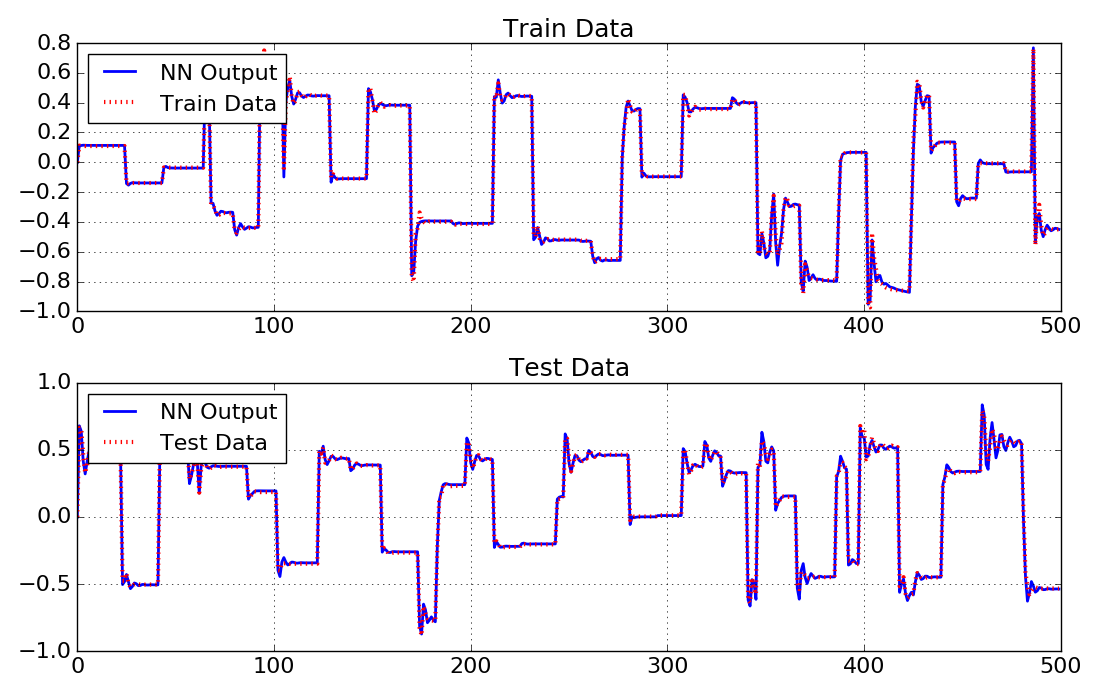
In this example a neural network is used to learn the response Y to an input P of a second order transfer function described by:
For training and testing the system a Amplitude Modlulated Pseudo Random Binary Sequence (APRBS) is used as input P and Ptest. A APRBS is a Pseudorandom binary sequence (PRBS), which is generated by a variation of the amplitude levels in addition to the variation of hold times of a PRBS.
This is an example of a dynamic system with one input and one output and can be found in python\examples\example_pt2.py and matlab\examples\example_pt2.m.
Python¶
At first the needed packages are imported. pandas for reading the excelfile, matplotlib for plotting the results and pyrenn for the neural network.
import pandas as pd
import matplotlib.pyplot as plt
import pyrenn as prn
Then the training input data P and output (target) data Y as well as the test input data Ptest and output data Ytest is read from the given excel file using pandas. Because we have only one input and one output here, the input and output data can be either a 1d numpy array, where the number of elements represents the number of data samples (this is the case here), or a 2d numpy array with shape (1,Q), where Q is the number of data samples.
df = pd.ExcelFile('example_data.xlsx').parse('pt2')
P = df['P'].values
Y = df['Y'].values
Ptest = df['Ptest'].values
Ytest = df['Ytest'].values
Then the neural network is created. Since we have a system with 1 input and 1 output, we need a neural network with the same number of inputs and outputs. For this system we choose a neural network with two hidden layers, each with 2 neurons. The system has no input delays, so we only use the current input dIn = [0]. Since we have a dynamic system, we want to create a recurrent neural network. We create a neural network with recurrent connections with delay of 1 timestep in the hidden layers (dIntern = [1]) and a recurrent connection with delay of 1 and 2 timesteps from the output to the first layer (dOut = [1,2])
net = prn.CreateNN([1,2,2,1],dIn=[0],dIntern=[1],dOut=[1,2])
Now we can train the created neural network net with the training data P and Y. verbose=True activates diplaying the error during training. We set the number of iterations (epochs) to 100 and the termination error to 1e-3. The Training will stop after 100 iterations or when Error <= E_stop.
net = prn.train_LM(P,Y,net,verbose=True,k_max=100,E_stop=1e-3)
After the training is finished, we can use the neural network. We calculate the neural network output y, using the training data P as input as well as the the output ytest, using the test data Ptest as input.
y = prn.NNOut(P,net) ytest = prn.NNOut(Ptest,net)
Now we can plot the results, comparing the output of the neural network with the training and the test data of the system.
fig = plt.figure(figsize=(11,7)) ax0 = fig.add_subplot(211) ax1 = fig.add_subplot(212) fs=18 #Train Data ax0.set_title('Train Data',fontsize=fs) ax0.plot(y,color='b',lw=2,label='NN Output') ax0.plot(Y,color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Train Data') ax0.tick_params(labelsize=fs-2) ax0.legend(fontsize=fs-2,loc='upper left') ax0.grid() #Test Data ax1.set_title('Test Data',fontsize=fs) ax1.plot(ytest,color='b',lw=2,label='NN Output') ax1.plot(Ytest,color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Test Data') ax1.tick_params(labelsize=fs-2) ax1.legend(fontsize=fs-2,loc='upper left') ax1.grid() fig.tight_layout() plt.show()
Matlab¶
At first the training input data P and output (target) data Y as well as the test input data Ptest and output data Ytest is read from the given excel file using xlsread. Because we have only one input and one output here, the input and output data has to be an array with size (1,Q), where Q is the number of data samples.
file = 'example_data.xlsx';
num = xlsread(file,'pt2');
P = num(:,2).';
Y = num(:,3).';
Ptest = num(:,4).';
Ytest = num(:,5).';
Then the neural network is created. Since we have a system with 1 input and 1 output, we need a neural network with the same number of inputs and outputs. For this system we choose a neural network with two hidden layers, each with 2 neurons. The system has no input delays, so we only use the current input dIn = [0]. Since we have a dynamic system, we want to create a recurrent neural network. We create a neural network with recurrent connections with delay of 1 timestep in the hidden layers (dIntern = [1]) and a recurrent connection with delay of 1 and 2 timesteps from the output to the first layer (dOut = [1,2])
nn = [1 2 2 1];
dIn = [0];
dIntern=[1];
dOut=[1,2];
net = CreateNN(nn,dIn,dIntern,dOut);
Now we can train the created neural network net with the training data P and Y. In matlab we have the option to train the network with the LM algorithm or the BFGS algorithm.
We start with the LM algorithm. We set the number of iterations (epochs) to 100 and the termination error to 1e-3. The Training will stop after 100 iterations or when Error <= E_stop.
netLM = train_LM(P,Y,net,100,1e-3);
After the training is finished, we can use the neural network. We calculate the neural network output y_LM, using the training data P as input as well as the the output ytest_LM, using the test data Ptest as input.
y_LM = NNOut(P,netLM);
ytest_LM = NNOut(Ptest,netLM);
Now we can do the same using the BFGS algorithm. The BFGS algorithm usually takes less time for one iteration, but needs more iterations to reach the same error than the LM. Therefore we set the number of iterations (epochs) to 200 and the termination error to 1e-3.
netBFGS = train_BFGS(P,Y,net,200,1e-3);
y_BFGS = NNOut(P,netBFGS);
ytest_BFGS = NNOut(Ptest,netBFGS);
Now we can plot the results, comparing the output of the two different neural networks with each other and with the training and the test data of the system.
fig = figure();
set(fig, 'Units', 'normalized', 'Position', [0.2, 0.1, 0.6, 0.6])
axis tight
subplot(311)
set(gca,'FontSize',16)
plot(Y,'r:','LineWidth',2)
hold on
grid on
plot(y_LM,'b','LineWidth',2)
plot(y_BFGS,'g','LineWidth',2)
l1 = legend('Train Data','LM output','BFGS output','Location','northwest');
set(l1,'FontSize',14)
subplot(312)
set(gca,'FontSize',16)
plot(Ytest,'r:','LineWidth',2)
hold on
grid on
plot(ytest_LM,'b','LineWidth',2)
plot(ytest_BFGS,'g','LineWidth',2)
l2 = legend('Test Data','LM output','BFGS output','Location','northwest');
set(l2,'FontSize',14)
subplot(313)
set(gca,'FontSize',16)
plot(netLM.ErrorHistory,'b','LineWidth',2)
hold on
grid on
plot(netBFGS.ErrorHistory,'g','LineWidth',2)
ylim([0,0.1])
l3 = legend('LM Error','BFGS Error','Location','northeast');
set(l3,'FontSize',14)
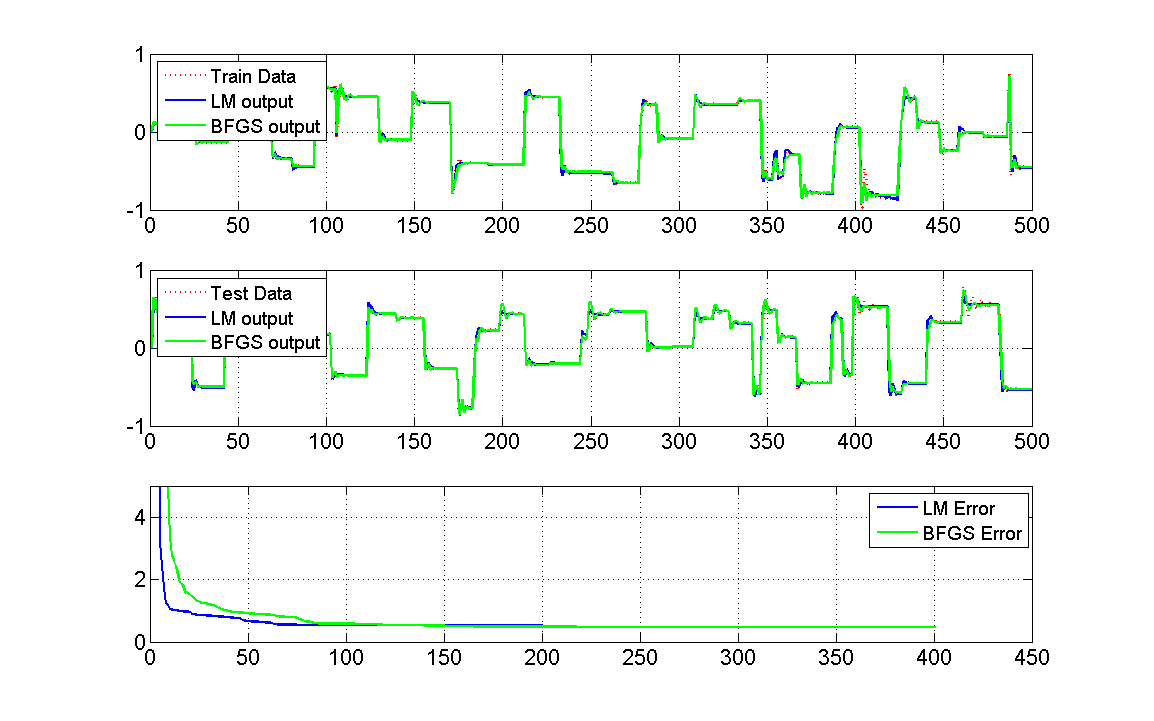
narendra4¶
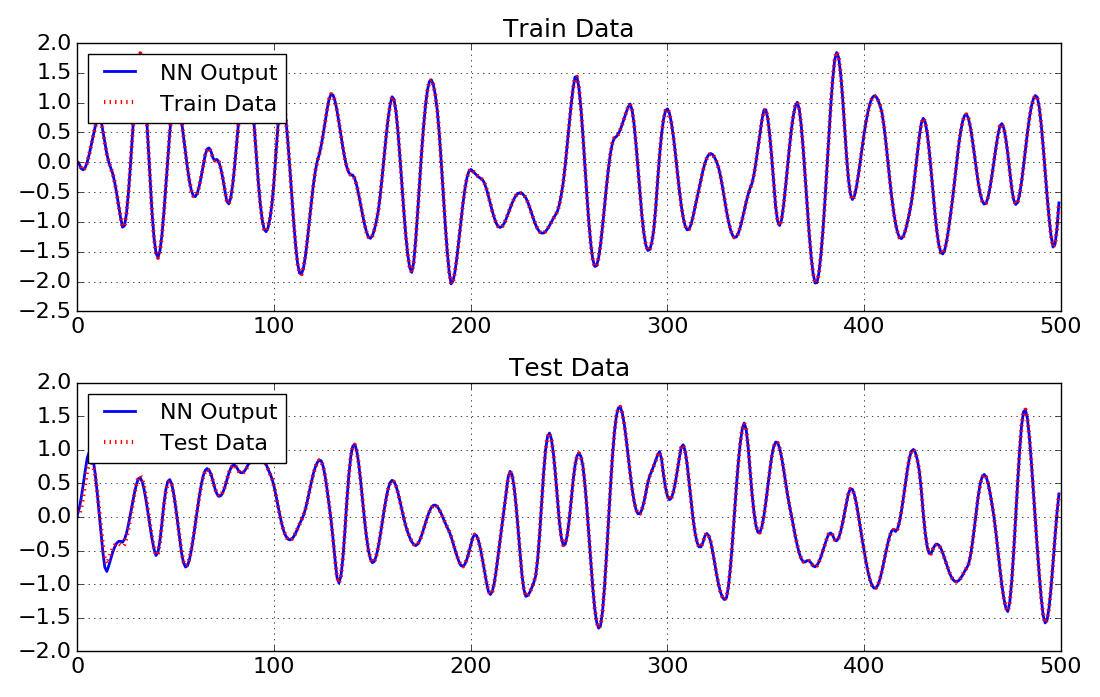
In this example a neural network is used to learn the narendra4 function introduced in
Narendra, K.S. und K. Parthasarathy: Identification and control of dynamical systems using neural networks. IEEE Transactions on Neural Networks, 1(1):4–27,March 1990.
given by:
For training and testing the system a Amplitude Modlulated Pseudo Random Binary Sequence (APRBS) is used as input P and Ptest. A APRBS is a Pseudorandom binary sequence (PRBS), which is generated by a variation of the amplitude levels in addition to the variation of hold times of a PRBS.
This is an example of a dynamic system with one output and one delayed input and can be found in python\examples\example_narendra4.py and matlab\examples\example_narendra4.m.
Python¶
At first the needed packages are imported. pandas for reading the excelfile, matplotlib for plotting the results and pyrenn for the neural network.
import pandas as pd
import matplotlib.pyplot as plt
import pyrenn as prn
Then the training input data P and output (target) data Y as well as the test input data Ptest and output data Ytest is read from the given excel file using pandas. Because we have only one input and one output here, the input and output data can be either a 1d numpy array, where the number of elements represents the number of data samples (this is the case here), or a 2d numpy array with shape (1,Q), where Q is the number of data samples.
df = pd.ExcelFile('example_data.xlsx').parse('narendra4')
P = df['P'].values
Y = df['Y'].values
Ptest = df['Ptest'].values
Ytest = df['Ytest'].values
Then the neural network is created. Since we have a system with 1 input and 1 output, we need a neural network with the same number of inputs and outputs. For this system we choose a neural network with two hidden layers, each with 3 neurons. To calculate the current output y[k], this system needs the inputs delayed by 1 and 2 time-steps p[k-1] and p[k-2], but not the current one p[k]. So we set the input delays to dIn = [1,2]. Since we have a dynamic system, we want to create a recurrent neural network. We know that the system has no internal states, so we do not need internal recurrent connections (dIntern = []). But we need a recurrent connection with delay of 1,2 and 3 timesteps from the output to the first layer (dOut = [1,2,3]), to calculate the current output y[k].
net = prn.CreateNN([1,3,3,1],dIn=[1,2],dIntern=[],dOut=[1,2,3])
Now we can train the created neural network net with the training data P and Y. verbose=True activates diplaying the error during training. We set the number of iterations (epochs) to 200 and the termination error to 1e-3. The Training will stop after 200 iterations or when Error <= E_stop.
net = prn.train_LM(P,Y,net,verbose=True,k_max=200,E_stop=1e-3)
After the training is finished, we can use the neural network. We calculate the neural network output y, using the training data P as input as well as the the output ytest, using the test data Ptest as input.
y = prn.NNOut(P,net)
ytest = prn.NNOut(Ptest,net)
Now we can plot the results, comparing the output of the neural network with the training and the test data of the system.
fig = plt.figure(figsize=(11,7))
ax0 = fig.add_subplot(211)
ax1 = fig.add_subplot(212)
fs=18
#Train Data
ax0.set_title('Train Data',fontsize=fs)
ax0.plot(y,color='b',lw=2,label='NN Output')
ax0.plot(Y,color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Train Data')
ax0.tick_params(labelsize=fs-2)
ax0.legend(fontsize=fs-2,loc='upper left')
ax0.grid()
#Test Data
ax1.set_title('Test Data',fontsize=fs)
ax1.plot(ytest,color='b',lw=2,label='NN Output')
ax1.plot(Ytest,color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Test Data')
ax1.tick_params(labelsize=fs-2)
ax1.legend(fontsize=fs-2,loc='upper left')
ax1.grid()
fig.tight_layout()
plt.show()
Matlab¶
At first the training input data P and output (target) data Y as well as the test input data Ptest and output data Ytest is read from the given excel file using xlsread. Because we have only one input and one output here, the input and output data has to be an array with size (1,Q), where Q is the number of data samples.
file = 'example_data.xlsx';
num = xlsread(file,'narendra4');
P = num(:,2).';
Y = num(:,3).';
Ptest = num(:,4).';
Ytest = num(:,5).';
Then the neural network is created. Since we have a system with 1 input and 1 output, we need a neural network with the same number of inputs and outputs. For this system we choose a neural network with two hidden layers, each with 3 neurons. To calculate the current output y[k], this system needs the inputs delayed by 1 and 2 time-steps p[k-1] and p[k-2], but not the current one p[k]. So we set the input delays to dIn = [1,2]. Since we have a dynamic system, we want to create a recurrent neural network. We know that the system has no internal states, so we do not need internal recurrent connections (dIntern = []). But we need and a recurrent connection with delay of 1,2 and 3 timesteps from the output to the first layer (dOut = [1,2,3]), to calculate the current output y[k].
nn = [1 2 2 1];
dIn = [1,2];
dIntern=[];
dOut=[1,2,3];
net = CreateNN(nn,dIn,dIntern,dOut);
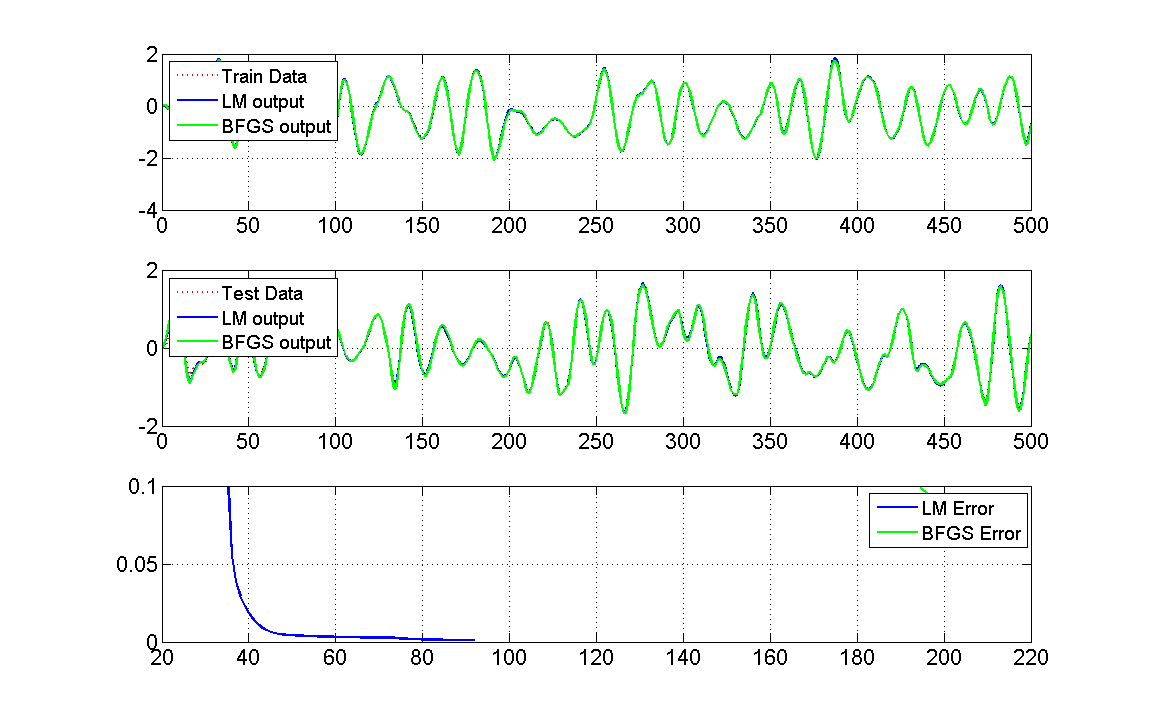
Now we can train the created neural network net with the training data P and Y. In matlab we have the option to train the network with the LM algorithm or the BFGS algorithm.
We start with the LM algorithm. We set the number of iterations (epochs) to 200 and the termination error to 1e-3. The Training will stop after 200 iterations or when Error <= E_stop.
netLM = train_LM(P,Y,net,200,1e-3);
After the training is finished, we can use the neural network. We calculate the neural network output y_LM, using the training data P as input as well as the the output ytest_LM, using the test data Ptest as input.
y_LM = NNOut(P,netLM);
ytest_LM = NNOut(Ptest,netLM);
Now we can do the same using the BFGS algorithm. The BFGS algorithm usually takes less time for one iteration, but needs more iterations to reach the same error than the LM. Therefore we set the number of iterations (epochs) to 400 and the termination error to 1e-3.
netBFGS = train_BFGS(P,Y,net,400,1e-3);
y_BFGS = NNOut(P,netBFGS);
ytest_BFGS = NNOut(Ptest,netBFGS);
Now we can plot the results, comparing the output of the two different neural networks with each other and with the training and the test data of the system.
fig = figure();
set(fig, 'Units', 'normalized', 'Position', [0.2, 0.1, 0.6, 0.6])
axis tight
subplot(311)
set(gca,'FontSize',16)
plot(Y,'r:','LineWidth',2)
hold on
grid on
plot(y_LM,'b','LineWidth',2)
plot(y_BFGS,'g','LineWidth',2)
l1 = legend('Train Data','LM output','BFGS output','Location','northwest');
set(l1,'FontSize',14)
subplot(312)
set(gca,'FontSize',16)
plot(Ytest,'r:','LineWidth',2)
hold on
grid on
plot(ytest_LM,'b','LineWidth',2)
plot(ytest_BFGS,'g','LineWidth',2)
l2 = legend('Test Data','LM output','BFGS output','Location','northwest');
set(l2,'FontSize',14)
subplot(313)
set(gca,'FontSize',16)
plot(netLM.ErrorHistory,'b','LineWidth',2)
hold on
grid on
plot(netBFGS.ErrorHistory,'g','LineWidth',2)
ylim([0,5])
l3 = legend('LM Error','BFGS Error','Location','northeast');
set(l3,'FontSize',14)
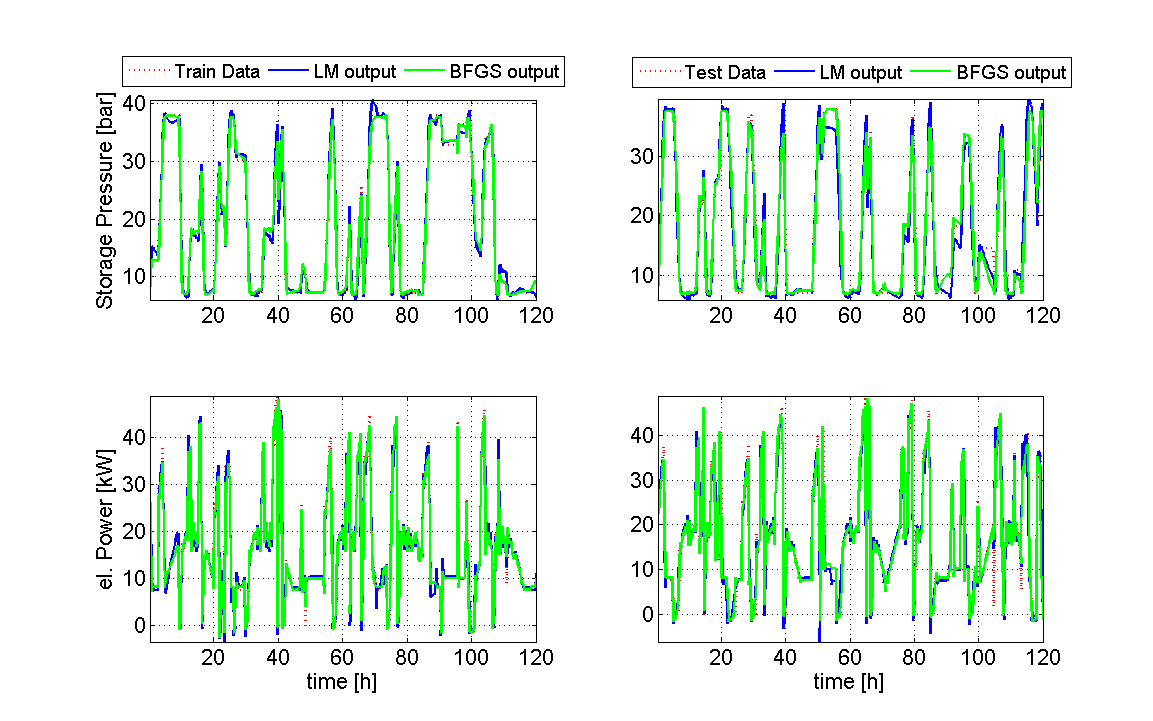
Compressed air storage system¶
In this example a neural network is used to learn the behavior of a compressed air storage test system.
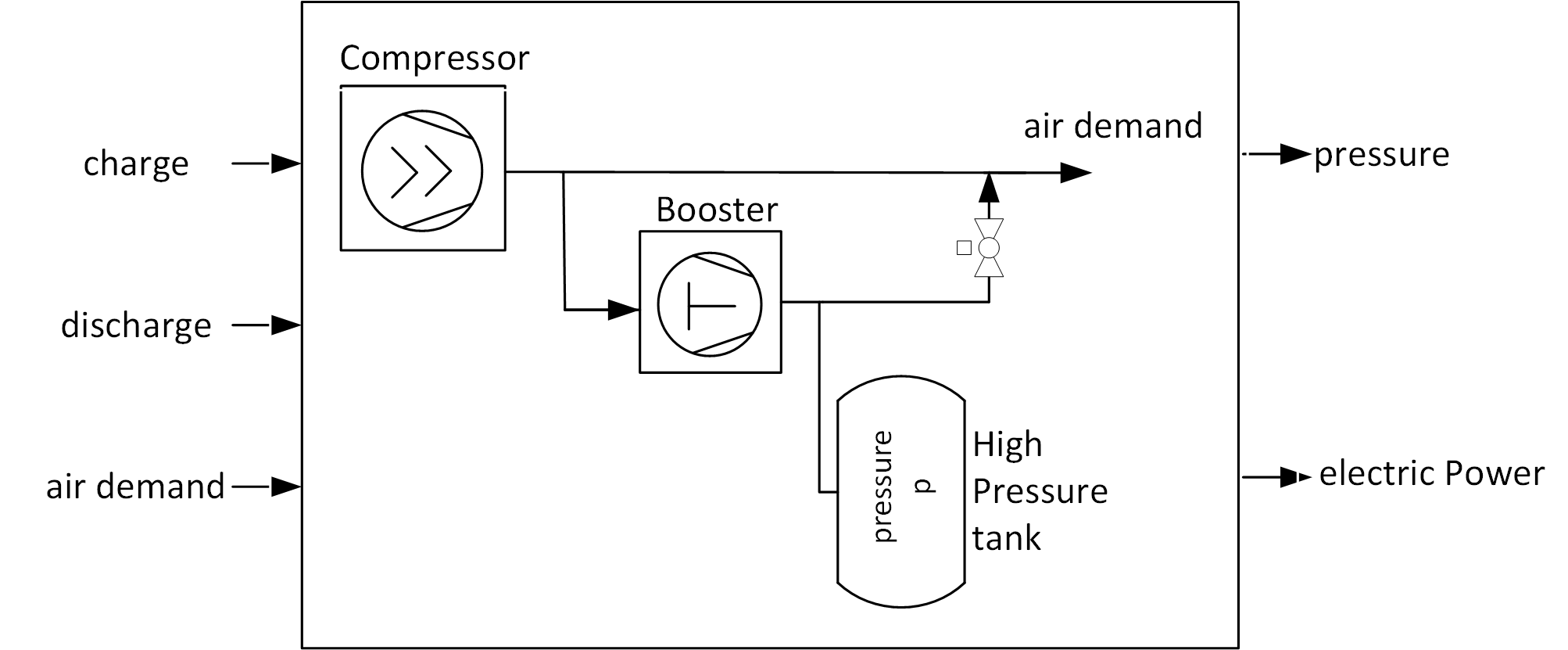
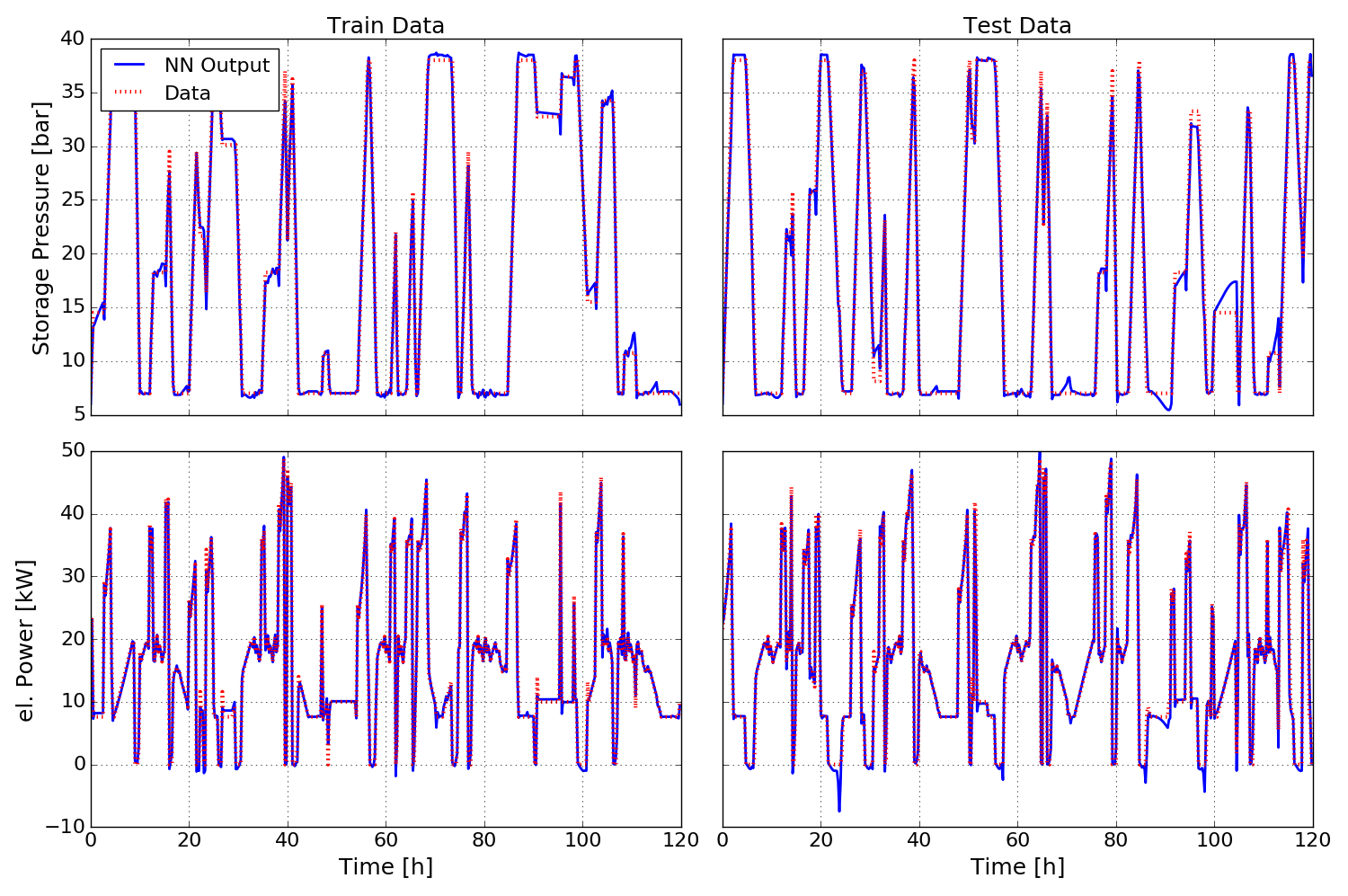
The system consists of a compressor, a booster, and a high pressure storage. The system has 3 inputs. If the binary input P1 (charge) is 1, the booster is running and charges the storage (to a maximum pressure of 38 bar). If the binary input P2 (discharge) is 1, the booster and the compressor are off and the air demand (input P3) is covered by the air in the storage, which is discharged (to a minimum pressure of 7 bar). If the storage is neither charged nor discharged, the compressor covers the air demand. The neural network is trained to calculate the state of the pressure in the storage (Y1) and the electric power consumption of the booster and the compressor (Y2) based on the given current inputs and the previous outputs.
This is an example of a dynamic system with 2 outputs and 3 inputs (see python\examples\example_compair.py and matlab\examples\example_compair.m).
Python¶
At first the needed packages are imported. pandas for reading the excelfile, matplotlib for plotting the results and pyrenn for the neural network.
import pandas as pd
import matplotlib.pyplot as plt
import pyrenn as prn
Then the training input data P and output (target) data Y as well as the test input data Ptest and output data Ytest is read from the given excel file using pandas. We have 3 inputs here, so the input P is a 2d array with shape(3,Q), where Q is the number of data samples. Since we have 2 ouputs the output Y is a 2d array with shape (2,Q).
df = pd.ExcelFile('example_data.xlsx').parse('compressed_air')
P = np.array([df['P1'].values,df['P2'].values,df['P3'].values])
Y = np.array([df['Y1'].values,df['Y2']])
Ptest = np.array([df['P1test'].values,df['P2test'].values,df['P3test'].values])
Ytest = np.array([df['Y1test'].values,df['Y2test']])
Then the neural network is created. Since we have a system with 3 inputs and 2 outputs, we need a neural network with the same number of inputs and outputs. For this system we choose a neural network with two hidden layers, each with 5 neurons. The system has no input delays, so we only use the current input dIn = [0]. Since we have a dynamic system, we want to create a recurrent neural network. We know that the system has no internal states, so we do not need internal recurrent connections (dIntern = []). But we need and a recurrent connection with delay of 1 timesteps from the output to the first layer (dOut = [1]), because the pressure of the current time-step depends on the pressure in the previous one.
net = prn.CreateNN([3,5,5,2],dIn=[0],dIntern=[],dOut=[1])
Now we can train the created neural network net with the training data P and Y. verbose=True activates diplaying the error during training. We set the number of iterations (epochs) to 500 and the termination error to 1e-5. The Training will stop after 500 iterations or when Error <= E_stop.
net = prn.train_LM(P,Y,net,verbose=True,k_max=500,E_stop=1e-5)
After the training is finished, we can use the neural network. We calculate the neural network output y, using the training data P as input as well as the the output ytest, using the test data Ptest as input. Since we have 2 outputs, y and ytest here are 2d arrays of shape (2,Q).
y = prn.NNOut(P,net) ytest = prn.NNOut(Ptest,net)
Now we can plot the results, comparing the output of the neural network with the training and the test data of the system.
fig = plt.figure(figsize=(15,10)) ax0 = fig.add_subplot(221) ax1 = fig.add_subplot(222,sharey=ax0) ax2 = fig.add_subplot(223) ax3 = fig.add_subplot(224,sharey=ax2) fs=18 t = np.arange(0,480.0)/4 #480 timesteps in 15 Minute resolution #Train Data ax0.set_title('Train Data',fontsize=fs) ax0.plot(t,y[0],color='b',lw=2,label='NN Output') ax0.plot(t,Y[0],color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Data') ax0.tick_params(labelsize=fs-2) ax0.legend(fontsize=fs-2,loc='upper left') ax0.grid() ax0.set_ylabel('Storage Pressure [bar]',fontsize=fs) plt.setp(ax0.get_xticklabels(), visible=False) ax2.plot(t,y[1],color='b',lw=2,label='NN Output') ax2.plot(t,Y[1],color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Train Data') ax2.tick_params(labelsize=fs-2) ax2.grid() ax2.set_xlabel('Time [h]',fontsize=fs) ax2.set_ylabel('el. Power [kW]',fontsize=fs) #Test Data ax1.set_title('Test Data',fontsize=fs) ax1.plot(t,ytest[0],color='b',lw=2,label='NN Output') ax1.plot(t,Ytest[0],color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Test Data') ax1.tick_params(labelsize=fs-2) # ax1.legend(fontsize=fs-2,loc='upper left') ax1.grid() plt.setp(ax1.get_xticklabels(), visible=False) plt.setp(ax1.get_yticklabels(), visible=False) ax3.plot(t,ytest[1],color='b',lw=2,label='NN Output') ax3.plot(t,Ytest[1],color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Test Data') ax3.tick_params(labelsize=fs-2) ax3.grid() ax3.set_xlabel('Time [h]',fontsize=fs) plt.setp(ax3.get_yticklabels(), visible=False) fig.tight_layout() plt.show()
Matlab¶
At first the training input data P and output (target) data Y as well as the test input data Ptest and output data Ytest is read from the given excel file using xlsread. We have 3 inputs here, so the input P is a 2d array with size(3,Q), where Q is the number of data samples. Since we have 2 ouputs the output Y is a 2d array with size (2,Q).
file = 'example_data.xlsx';
num = xlsread(file,'compressed_air');
P = num(:,2:4).';
Y = num(:,5:6).';
Ptest = num(:,7:9).';
Ytest = num(:,10:11).';
Then the neural network is created. Since we have a system with 3 inputs and 2 outputs, we need a neural network with the same number of inputs and outputs. For this system we choose a neural network with two hidden layers, each with 5 neurons. The system has no input delays, so we only use the current input dIn = [0]. Since we have a dynamic system, we want to create a recurrent neural network. We know that the system has no internal states, so we do not need internal recurrent connections (dIntern = []). But we need and a recurrent connection with delay of 1 timesteps from the output to the first layer (dOut = [1]), because the pressure of the current time-step depends on the pressure in the previous one.
nn = [3 4 4 2];
dIn = [0];
dIntern=[];
dOut=[1];
net = CreateNN(nn,dIn,dIntern,dOut);
Now we can train the created neural network net with the training data P and Y. In matlab we have the option to train the network with the LM algorithm or the BFGS algorithm.
We start with the LM algorithm. We set the number of iterations (epochs) to 500 and the termination error to 1e-5. The Training will stop after 500 iterations or when Error <= E_stop.
netLM = train_LM(P,Y,net,500,1e-5);
After the training is finished, we can use the neural network. We calculate the neural network output y_LM, using the training data P as input as well as the the output ytest_LM, using the test data Ptest as input. Since we have 2 outputs, y and ytest here are 2d arrays of ssize (2,Q).
y_LM = NNOut(P,netLM);
ytest_LM = NNOut(Ptest,netLM);
Now we can do the same using the BFGS algorithm. The BFGS algorithm usually takes less time for one iteration, but needs more iterations to reach the same error than the LM. Therefore we set the number of iterations (epochs) to 1000 and the termination error to 1e-5.
netBFGS = train_BFGS(P,Y,net,1000,1e-5);
y_BFGS = NNOut(P,netBFGS);
ytest_BFGS = NNOut(Ptest,netBFGS);
Now we can plot the results, comparing the output of the two different neural networks with each other and with the training and the test data of the system.
t = (1:480.0)./4; %480 timesteps in 15 Minute resolution
fig = figure();
set(fig, 'Units', 'normalized', 'Position', [0.2, 0.1, 0.6, 0.6])
subplot(221)
title('Test Data')
set(gca,'FontSize',16)
plot(t,Y(1,:),'r:','LineWidth',2)
hold on
grid on
plot(t,y_LM(1,:),'b','LineWidth',2)
plot(t,y_BFGS(1,:),'g','LineWidth',2)
l1 = legend('Train Data','LM output','BFGS output','Location','northoutside','Orientation','horizontal');
set(l1,'FontSize',14)
ylabel('Storage Pressure [bar]')
axis tight
subplot(223)
set(gca,'FontSize',16)
plot(t,Y(2,:),'r:','LineWidth',2)
hold on
grid on
plot(t,y_LM(2,:),'b','LineWidth',2)
plot(t,y_BFGS(2,:),'g','LineWidth',2)
ylabel('el. Power [kW]')
xlabel('time [h]')
axis tight
subplot(222)
title('Train Data')
set(gca,'FontSize',16)
plot(t,Ytest(1,:),'r:','LineWidth',2)
hold on
grid on
plot(t,ytest_LM(1,:),'b','LineWidth',2)
plot(t,ytest_BFGS(1,:),'g','LineWidth',2)
l2 = legend('Test Data','LM output','BFGS output','Location','northoutside','Orientation','horizontal');
set(l2,'FontSize',14)
axis tight
subplot(224)
set(gca,'FontSize',16)
plot(t,Ytest(2,:),'r:','LineWidth',2)
hold on
grid on
plot(t,ytest_LM(2,:),'b','LineWidth',2)
plot(t,ytest_BFGS(2,:),'g','LineWidth',2)
xlabel('time [h]')
axis tight
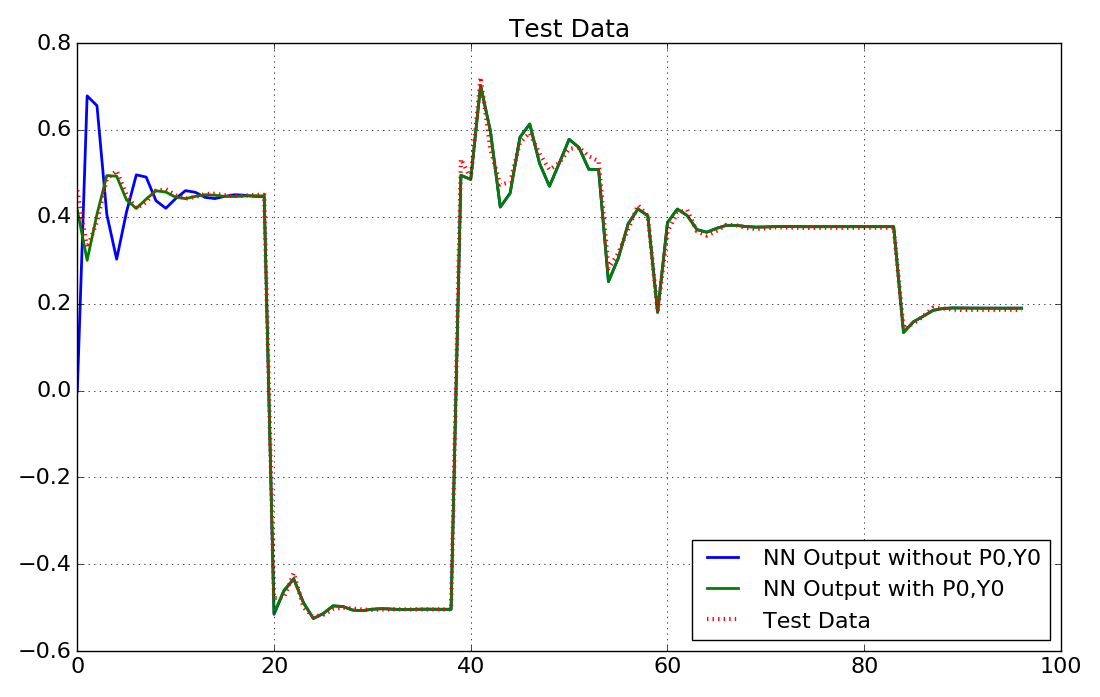
Using previous data P0 and Y0 in a recurrent neural network¶
This example shows how to use known previous data P0 and Y0 when using a trained neural network to calculate outputs (see Using previous inputs and outputs for recurrent networks or networks with delayed inputs).
It is based on the narendra4 example and can be found in python\examples\example_using_P0Y0_narendra4.py and matlab\examples\example_using_P0Y0_narendra4.m. Another example that shows how to use previous inputs and outputs P0 and Y0 can be found in example_using_P0Y0_compair.py and example_using_P0Y0_compair.m
Python¶
At first the needed packages are imported, and the training and test data is read from the excel file.
import pandas as pd
import matplotlib.pyplot as plt
import pyrenn as prn
df = pd.ExcelFile('example_data.xlsx').parse('narendra4')
P = df['P'].values
Y = df['Y'].values
Ptest_ = df['Ptest'].values
Ytest_ = df['Ytest'].values
Now we assume, that we already know the first 3 data samples of the input and output of test data and define them as P0test and Y0test (we choose 3 time-steps, because the neural network has a maximum delay of 3). Then we define the applied test data Ptest and the system output we can compare the network output with Ytest, which do not contain the data samples we already know.
#define the first 3 timesteps t=[0,1,2] of Test Data as previous (known) data P0test and Y0test
P0test = Ptest_[0:3]
Y0test = Ytest_[0:3]
#Use the timesteps t = [3..99] as Test Data
Ptest = Ptest_[3:100]
Ytest = Ytest_[3:100]
Then we create and train the network
net = prn.CreateNN([1,3,3,1],dIn=[1,2],dIntern=[],dOut=[1,2,3])
net = prn.train_LM(P,Y,net,verbose=True,k_max=200,E_stop=1e-3)
Now we can use the trained network. To investigate the influence of using the previous data P0test and Y0test, we calculate the neural network output ytest0 with and ytest without using them.
ytest = prn.NNOut(Ptest,net)
y0test = prn.NNOut(Ptest,net,P0=P0test,Y0=Y0test)
Now we plot the results
fig = plt.figure(figsize=(11,7))
ax1 = fig.add_subplot(111)
fs=18
#Test Data
ax1.set_title('Test Data',fontsize=fs)
ax1.plot(ytest,color='b',lw=2,label='NN Output without P0,Y0')
ax1.plot(y0test,color='g',lw=2,label='NN Output with P0,Y0')
ax1.plot(Ytest,color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Test Data')
ax1.tick_params(labelsize=fs-2)
ax1.legend(fontsize=fs-2,loc='lower right')
ax1.grid()
fig.tight_layout()
plt.show()
Looking at the results, we can see the difference of the neural network outputs. If we do not use previous data P0 and Y0, the neural network sets the not known delayed inputs and outputs to zero, which leads to a poor result of the neural network ouput for the first time-steps. In contrast, when the prvoius outputs P0 and Y0 are used, the network shows good results from the beginning.
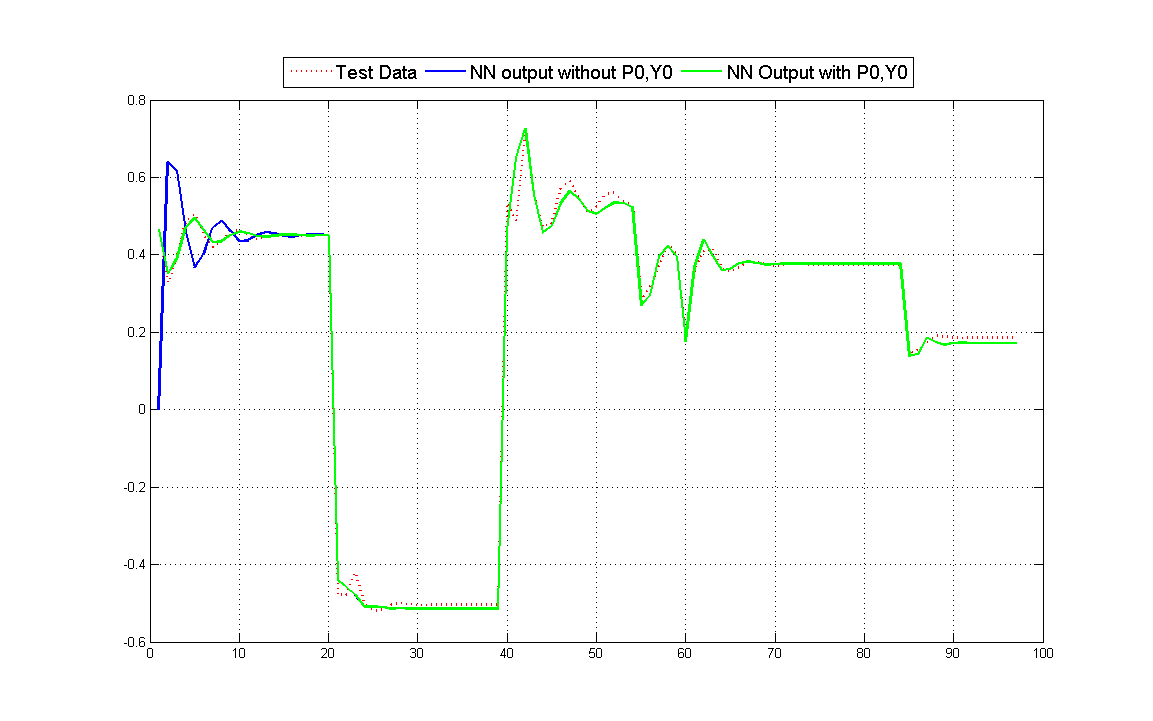
Matlab¶
At first the training and test data is read from the excel file.
file = 'example_data.xlsx';
num = xlsread(file,'narendra4');
P = num(:,2).';
Y = num(:,3).';
Ptest_ = num(:,4).';
Ytest_ = num(:,5).';
Now we assume, that we already know the first 3 data samples of the input and output of test data and define them as P0test and Y0test (we choose 3 time-steps, because the neural network has a maximum delay of 3). Then we define the applied test data Ptest and the system output we can compare the network output with Ytest, which do not contain the data samples we already know.
%define the first 3 timestep t=[1,2,3] of Test Data as previous (known)
%data P0test and Y0test
P0test = Ptest_(:,1:3);
Y0test = Ytest_(:,1:3);
%Use the timesteps t = [4..100] as Test Data
Ptest = Ptest_(:,4:100);
Ytest = Ytest_(:,4:100);
Then we create and train the network with the LM algorithm
nn = [1 2 2 1];
dIn = [1,2];
dIntern=[];
dOut=[1,2,3];
net = CreateNN(nn,dIn,dIntern,dOut);
net = train_LM(P,Y,net,200,1e-3);
Now we can use the trained network. To investigate the influence of using the previous data P0test and Y0test, we calculate the neural network output ytest0 with and ytest without using them.
ytest = NNOut(Ptest,net);
y0test = NNOut(Ptest,net,P0test,Y0test);
Now we plot the results
fig = plt.figure(figsize=(11,7))
ax1 = fig.add_subplot(111)
fs=18
#Test Data
ax1.set_title('Test Data',fontsize=fs)
ax1.plot(ytest,color='b',lw=2,label='NN Output without P0,Y0')
ax1.plot(y0test,color='g',lw=2,label='NN Output with P0,Y0')
ax1.plot(Ytest,color='r',marker='None',linestyle=':',lw=3,markersize=8,label='Test Data')
ax1.tick_params(labelsize=fs-2)
ax1.legend(fontsize=fs-2,loc='lower right')
ax1.grid()
fig.tight_layout()
plt.show()
Looking at the results, we can see the difference of the neural network outputs. If we do not use previous data P0 and Y0, the neural network sets the not known delayed inputs and outputs to zero, which leads to a poor result of the neural network ouput for the first time-steps. In contrast, when the prvoius outputs P0 and Y0 are used, the network shows good results from the beginning.
Calculate the gradient of a neural network¶
This example shows how to calculate the gradient vector (or derivative vector) \(\underline{g}\) of the Error \(E\) of a neural network with respect to the weight vector \(\underline{w}\). The gradient vector can be calculated either using RTRL or BPTT algorithm. The gradient \(\underline{g}\) or the Jacobian \(\widetilde{J}\) can be used to implement other training algorithms than the ones given in pyrenn. The examples can be found in python\examples\gradient_calculation.py and matlab\examples\gradient_calculation.m.
Calculating the gradient vector \(\underline{g}\) with the RTRL algorithm needs more time than with the BPTT algorithm. But for calculating the Jacobian matrix \(\widetilde{J}\), the RTRL algorithm is faster than the BPTT algorithm (calculating \(\widetilde{J}\) with BPTT is not implemented in pyrenn). So if the training algorithm uses the Jacaobian matrix \(\widetilde{J}\) (like the LM algorithm), RTRL is prefered and if the training algorithm uses the gradient vector \(\underline{g}\) (like the BFGS algorithm), BPTT is preferred.
Python¶
At first the needed packages are imported, the training data is read from the excel file and a neural network is created.
import numpy as np
import pandas as pd
import time
import pyrenn as prn
df = pd.ExcelFile('example_data.xlsx').parse('pt2')
P = df['P'].values
Y = df['Y'].values
net = prn.CreateNN([1,2,2,1],dIn=[0],dIntern=[1],dOut=[1,2])
Then the dict data, which contains the training data P and Y has to be created using prn.prepare_data().
data,net = prn.prepare_data(P,Y,net)
Now the gradient can be calculated. The function prn.RTRL() uses the Real Time Recurrent Learning algorithm and returns the Jacobian matrix \(\widetilde{J}\), the error vector \(\underline{e}\) and the error \(E\) for the current weight vector \(\underline{w}=\) net['w']. The gradient vector \(\underline{g}\) can then be caluclated with \(\underline{g} = 2 * \widetilde{J}^T * \underline{e}\)
J,E,e = prn.RTRL(net,data)
g_rtrl = 2 * np.dot(J.transpose(),e)
The function prn.BPTT() uses the Back Propagation Through Time algorithm and returns the gradient vector \(\underline{g}\) and the error \(E\) for the current weight vector \(\underline{w}=\) net['w']
g_bptt,E = prn.BPTT(net,data)
Matlab¶
At first the training data is read from the excel file and a neural network is created.
file = 'example_data.xlsx';
num = xlsread(file,'pt2');
P = num(:,2).';
Y = num(:,3).';
nn = [1 2 2 1];
dIn = [0];
dIntern=[1];
dOut=[1,2];
net = CreateNN(nn,dIn,dIntern,dOut);
Then the struct data, which contains the training data P and Y has to be created using prepare_data().
data = prepare_data(P,Y,net,{},0);
Now the gradient can be calculated. The function prn.RTRL() uses the Real Time Recurrent Learning algorithm and returns the Jacobian matrix \(\widetilde{J}\), the error vector \(\underline{e}\) and the error \(E\) for the current weight vector \(\underline{w}=\) net.w. The gradient vector \(\underline{g}\) can then be caluclated with \(\underline{g} = 2 * \widetilde{J}^T * \underline{e}\)
[J,E,e] = RTRL(net,data);
g_rtrl = 2.*J'*e;
The function prn.BPTT() uses the Back Propagation Through Time algorithm and returns the gradient vector \(\underline{g}\) and the error \(E\) for the current weight vector \(\underline{w}=\) net.w.
g_bptt = BPTT(net,data);